search the site












Project proposal – The integration of GPS tracking and aerial shooting technology in outdoor sports events

Project proposal – The integration of GPS tracking and aerial shooting technology in outdoor sports events
Wong Kwan Ho, Marco; The Hong Kong Polytechnic University
Abstract–This proposal aims to develop a united GPS tracking and aerial camera system which can shoot more affordable distance footage of athletes competing in outdoor sports events. The project combines a portable GPS system, Unmanned Aerial Vehicle (UAV), Wescam Camera system (WCS), with CAD sketching and calibration of algorithms so as to improve the quality of animation, notably in physical contests. C++ code will be constructed to implement the logic flow of the calibration process, WCS will be utilized to capture HD images, a UAV will be employed to replace the traditional helicopter and GPS will be used to provide accurate location tracking. The UAV and WCS will be connected via simple circuit connection in which signals will be transmitted and received through appropriate GPS bandwidth in order to produce a sophisticated sports animation.
I. INTRODUCTION
A. Background
Technological advancements have led to the availability of a plethora of positioning and tracking systems which can trace one’s outdoor behavioural patterns [1]. The production and development of integrated innovative services has been experiencing an increasing demand in the IT market in the last few years [2]. To meet the market’s requirements, the author would like to explore the possibility of integrating Global Positioning System (GPS) and aerial camera technology for outdoor sports events by introducing a portable GPS unit, which is a device worn on arm, wrist or knee to receive broadcast signal from navigation satellites [3]. This can be achieved by estimating and calibrating algorithms for distributed sampling system which aims at providing precision location history to the Unmanned Aerial Vehicle (UAV) for tracing and capturing athletes’ trials [3]. Indeed, this proposed scheme is advantageous to both sports and the engineering industry as the former can benefit from a reduction of filming expenses, while the latter can profit from the promotion of tracking techniques in the geo-engineering field [4]. It is hoped that all the target audience, such as sportsmen and sports documentary filmmakers, will find this technology valuable and serviceable when compared to traditional photographic methods that have been developed before.
II. LITERATURE REVIEW
In the past few decades, the application of aerial camera imaging has expanded into different industries, for example filming, ecology control, entertainment and sports [5]. However as pointed out by Ahmed [6], these practises involve huge amounts of expenditure as large-scale transportation, such as helicopters, may be needed for following the route taken by individuals. He suggested combining GPS techniques with UAVs when determining their route [6]. This idea is well-supported by Kratochwill & Nunez [1], and they strongly advocate the use of amalgamated GPS in verifying one’s position. Kelsey, a film director [7], also presents evidence to show it is feasible to adopt the enhanced GPS technology, especially in the filming industry, by employing a specialized WCS system that can stabilize UVA shots to produce excellent quality cinematographic film within a few seconds. The above literature demonstrates the potential of the proposed GPS aerial camera technology as practicable and workable in real life situations.
Despite uniting GPS and UAV, certain researchers also recommend and encourage sports companies to import the preceding techniques into outdoor exercises. Clifton and Krizek [8] suggest that GPS and UAV can be integrated and implemented with aerial image capturing by utilizing advanced camera systems. Rainham et al. [9] think this filming method can enormously reduce the cost of videotaping. In addition to reducing expenses, some sports educators [10] also believe that the proposed technique is useful for sportsmen as they can review the event process from a comprehensive range of angles which may be beneficial for them to strengthen their performance in the long run. Put differently, the introduced integrated tracking technology can not merely enhance the effectiveness of sports scene capturing, but can also provide an alternative to sports games players for monitoring their performance during the course of the competition.
III. TECHNICAL DETAILS/METHODOLOGY
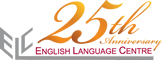
In the project, a number of technologies regarding calibration of algorithms, UAV, Wescam Camera System (WCS) and GPS will be adopted for the proposed service [11]. The first technique concerns importing GPS data, calculating separation and velocity between collected points, classifying them into k trips according to a constant time interval with time pause=4 minutes and denoting the first trip as p=1 [3]. It is then followed by a “for” loop to check the value of p and k in which data analysis will be conducted if p is smaller than or equals to k. The looping will end once p is larger than k, which also implies the entire data evaluation is finished. Diverse criteria can be set to filter out any unwanted conditions in order to intensify the accuracy of the analysed data. Finally, moving paths will be drawn in proportion on a simplified 2D map to present the tracking results.
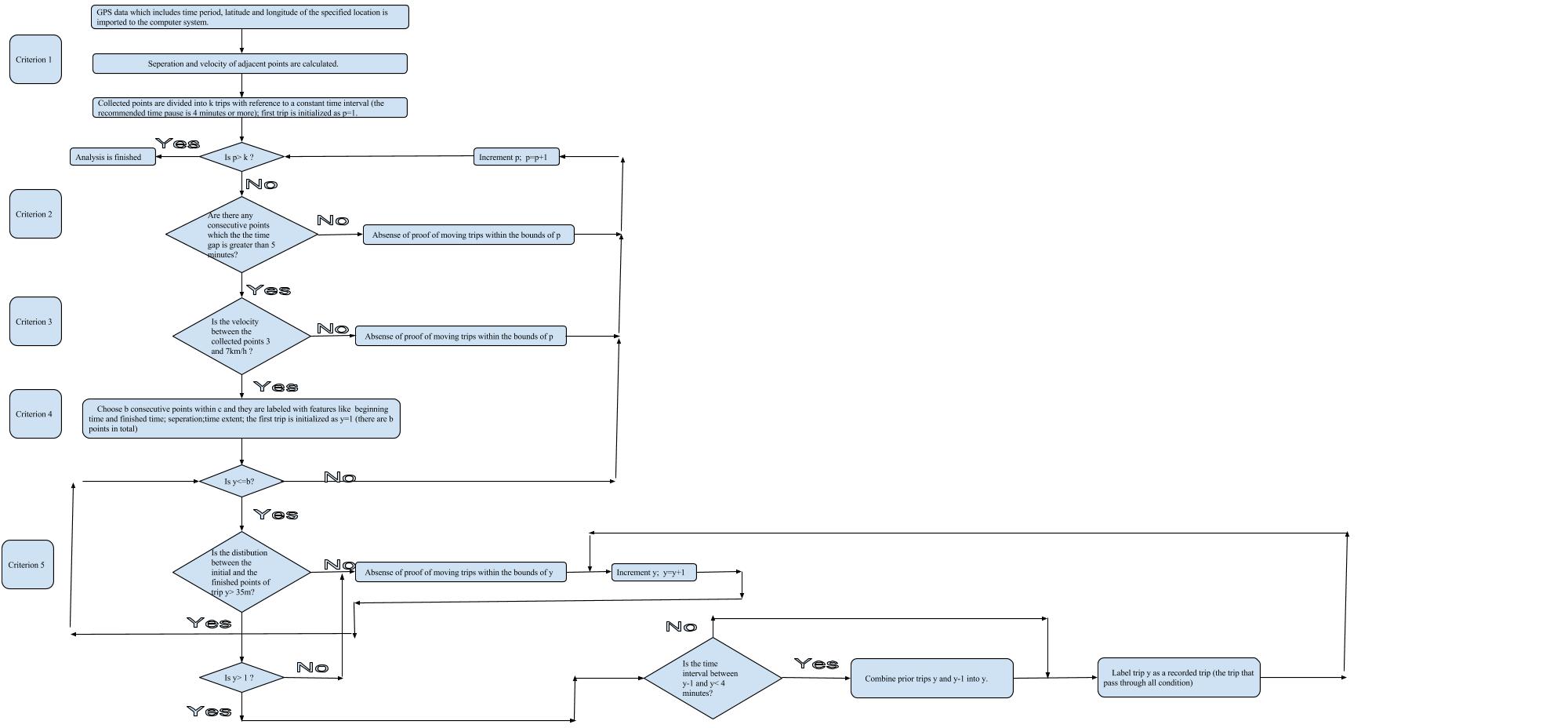
Fig. 1 Flow chart indicating the calibration and estimation process of algorithms to identify numerous trips with various criteria [3].
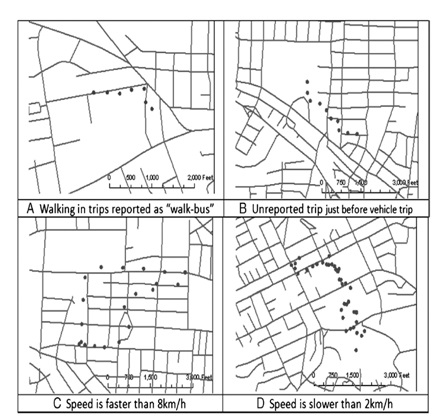
Fig. 2 The above figure demonstrates the tracing paths of an athlete during a “walking” competition [3].
Apart from calibration technique, UAV technology will be applied in this project. A specialized aerial mapping UAV will be utilized for taking photos.
Fig. 3 With reference to Valente [12], the above CAD figure exhibits a probable sketching of the UAV for this proposed project.
In addition to UAV, WCS will be selected. As advised by PictorVision [12], it is essential to utilise a stable High-Definition digital camera which can vastly increase the quality of photographic images.

Fig. 4 A possible WCS design [11].
Additionally, GPS tracking techniques will be employed. The frequency of the GPS is 1575.42 MHz [13]. In order to transmit and receive signals properly, both the GPS transmitter and receiver will be made by a GPS manufacturer. Only the exterior of the structure will be designed.

Fig. 5 One possible designs of a GPS tracker which can be put on the wrist [14].
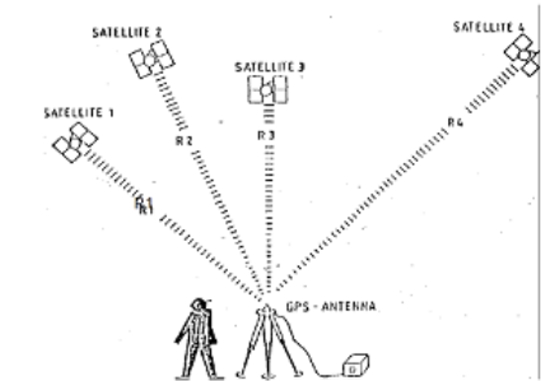
Fig. 6 The basic principle of positioning with GPS [15].stead of satellite).
As seen from the Figure 6, a continuous signal will be released from a small GPS transmitter (instead of satellite).

Fig. 7 A probable tiny GPS circuit board transmitter [16].
IV. OBJECTIVES
A. Short-term goals
The primary goal of the project is to build a UAV with unified GPS and aerial camera technology which can be utilised in a wide range of sports competitions, and promoted and marketed via
1) Extra-team Collaboration: Fusing WCS and GPS tracking technologies to maximise the tracing accuracy to yield a superior quality of animation through the cooperation between production company and engineering team [17].
2) Technology Implementation: Implementing the technique in open-air sports events.
3) Product Marketing: Advertising the product to press, sports corporations, event sponsors, engineering enterprises, the educational sector, and documentary studios through marketing campaign.
B. Long- term goals
The secondary goals involve the following –
1) Applying for a patent in Hong Kong.
2) Expanding the business to other developed countries.
The project is likely to be successful as the various components underscoring the idea are supported by numerous studies (refer to Literature Review). Furthermore, it will only be applied to outdoor sports events. Indoor places are not covered in this proposal. This will allow room for improvement in the future.
V. PILOT STUDY
A pilot study was carried out before actual project execution. Around 50 sportsmen were invited to join the preliminary study.
A. Background of the study
The purpose of the pilot experiment is to generate solid data from which to inspect the function of the proposed service through holding a “minute” walking competition in Kowloon Park and compare the mock results with research findings. Particularly, the target of this pilot project was to analyse factors that may affect signal communication between GPS transmitter and receiver.
B. Information gathering for the pilot study
Statistics for the study were collected from January to late February 2015. Each athlete walked a designated path with appointed checkpoints. Information which consisted of athletes’ velocity and separation between neighbouring spots was collected. About one-third of racers walked at less than 3km/h; another one-third of competitors jogged between 3km/h and 7km/h; lastly one third of them ran at a speed higher than 7km/h. Besides, the time gap between half of the adjacent check marks was less than 5 minutes, while the other half was greater than 5. At this stage, plentiful tracing spots were recorded.
C. Summary and Implication of findings of the study
Nearly all recorded tracking footpath showed no disagreement when compared to the appointed walking path. This revealed our system was precise enough if it is applied in outdoor environment. Some possible objects, for example, tall buildings may block the signal spreading [18].
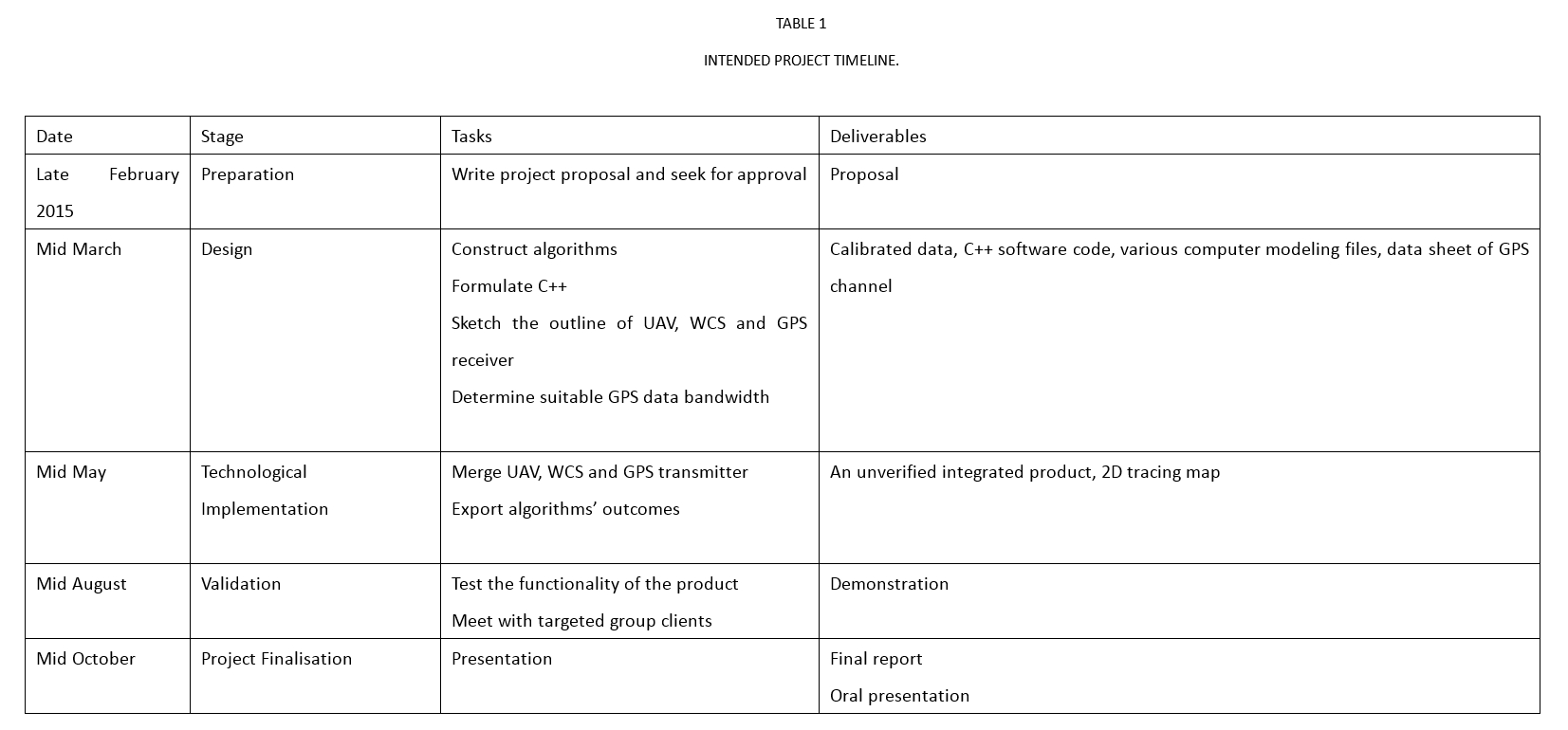
VI. SCHEDULE
VII. BUDGET
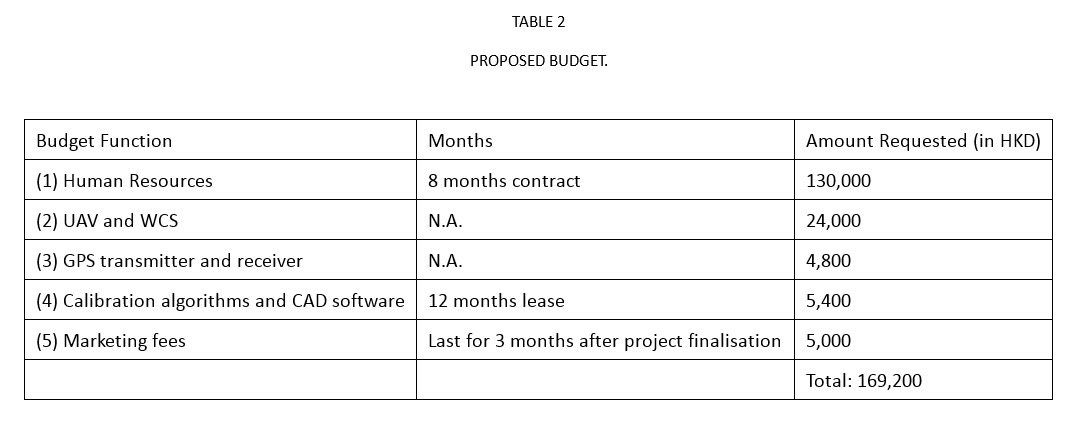
A. Cost Justification
-
- 2 Information Engineers, 1 Marketing Officer, and 1 Aerospace Engineer will be hired. They will work for a maximum of 8 hours per day, and 2 days per week (HKD 60 per hour).
- A low cost UAV will be used. The expense for the UAV will not exceed HKD 4,000. Furthermore the official price of WCS is 20,000 HKD.
- Micro GPS tracking transmitter will be adopted. The price will not exceed HKD 800. A GPS receiver is more expensive as up-to-date technology is required.
- Authorised subscription fee for the software.
- Exhibitions will be held to promote our product.
REFERENCES
1. M. Nunez and L. Kratochwill, “The best drone for aspiring filmmakers,” Popular Science, vol. 286, no. 2, pp. 13, 2015.
2. S. E. Needleman, “Small IT market attracts big companies. (Industry overview),” The Wall Street Journal Eastern Edition, vol. 0, no. 0, pp. B5(1), 2012.
3. A. Nanami and H. Yamada, “Size and spatial arrangement of home range of checkered snapper Lutjanus decussatus (Lutjanidae) in an Okinawan coral reef determined using a portable GPS receiver,” Marine Biology, vol. 153, no. 6, pp. 1103-1111, 2008.
4. P. S. Corden, “Geoengineering: guidance exists,” Science (New York, N.Y.), vol. 340, no. 6132, pp. 548, 2013.
5. E. Falkner, Aerial mapping: methods and applications. Boca Raton: Lewis, 1995.
6. E. Ahmed, Introduction to GPS the Global Positioning System. Boston, MA: Artech House, 2002.
7. C. Kelsey, Camera Experts Designed a New Kind of 360° Rig for Jupiter Ascending [Online]. Available: http://gizmodo.com/camera-experts-designed-a-new-kind-of-360-rig-for-jupi-1683857997 [Accessed 22 February 2015].
8. K. Clifton and K. Krizek, The utility of the NHTS in understanding bicycle and pedestrian travel. Washington (DC): Proceedings of the National Household Travel Survey Conference, 2004.
9. D. Rainham et al, “Development of a wearable global positioning system for place and health research,” Int J Health Geogr, vol. 7, no. 59, pp. 35-45.
10. J. W. Berryman and R. J. Park, Sport and exercise science: essays in the history of sports medicine. Urbana: University of Illinois Press, 1992.
11. T. Hallman et al. Wescam Systems: 35mm, HD & Digital Cinema [Online]. Available: http://www.pictorvision.com/aerial-products/wescam-systems/ [Accessed 21 February 2015].
12. E. A. Valente, “Composite construction of an unmanned aerial vehicle,” Masters Abstracts International, vol. 44, no. 6, pp. 2870, 2006.
13. A. Brown et al., Simulating GPS signal [Online]. Available: http://gpsworld.com/simulating-gps-signals/ [Accessed 21 February 2015].
14. M. Kao et al. Portable Avionics in a Wrist-worn Package [Online]. Available: https://buy.garmin.com/en-US/US/in-the-air/portable-gps/d2-/prod148289.html [Accessed 22 February 2015].
15. P. L. Raju, Fundamentals of GPS. Dehra Dun: Satellite Remote Sensing and GIS Applications in Agricultural Meterorology, 2003.
16. K. P. Kamble. Smart vehicle tracking system [Online]. Available: http://airccse.org/journal/ijdps/papers/0712ijdps10.pdf [Accessed 22 February 2015].
17. B. Cumberbatch. JERUSALEM 3D, Narrated by Benedict Cumberbatch [Online]. Available: http://www.prnewswire.com/news-releases/jerusalem-3d-narrated-by-benedict-cumberbatch-300029616.html [Accessed 22 February 2015].
18. P. Schantz and E. Stigell, “A criterion method for measuring route distance in physically active commuting,” Med Sci Sports Exerc., vol. 41, no. 2, pp. 472-478, 2009.
PROFILE PICTURE

BIO
Marco Wong Kwan Ho, a current year three IMT student studying at The Hong Kong Polytechnic University, is an intern at Gibson Innovations as well as a piano teacher.
REFLECTION
This proposal was part of an assessment for an English Language Centre course Professional Communication in English in which Engineering students proposed a new engineering service or product which is beneficial to society. The author’s proposal was to analyse the possibility of introducing a united GPS tracking technology and to discuss its real world implementation.